

APPLICATION OVERVIEW

網思科(kē)技(jì )基于MetaTwins數字孿生底座打造的無人駕駛車(chē)輛運營仿真平台,采用(yòng)了數字孿生技(jì )術,集成車(chē)聯網、車(chē)路協同、無人駕駛、智能(néng)派車(chē)、GIS、AI等平台數據,集中(zhōng)對園區(qū)、道路、車(chē)輛、交通參與者的各類信息進行采集,監測者可(kě)從屏幕上 實時監測到每一台自動駕駛汽車(chē)周邊的實際情況和它的運行情況,遠(yuǎn)程确保車(chē)輛的安(ān)全行駛。
一期項目已成功構建了穩固的園區(qū)與車(chē)輛運營管理(lǐ)體(tǐ)系,實現高效調度與監控,為(wèi)無人駕駛規模化運營打下堅實基礎。二期項目也進一步融合L3級别自動駕駛,以實現更高效、安(ān)全和智能(néng)的車(chē)輛運營。
2023年4月12日,習近平總書記在廣州市調研考察期間,重點關注了網思科(kē)技(jì )為(wèi)廣州某大型國(guó)有(yǒu)汽車(chē)制造企業提供技(jì )術支撐的重點項目——Robo Taxi 數智運營服務(wù)平台。
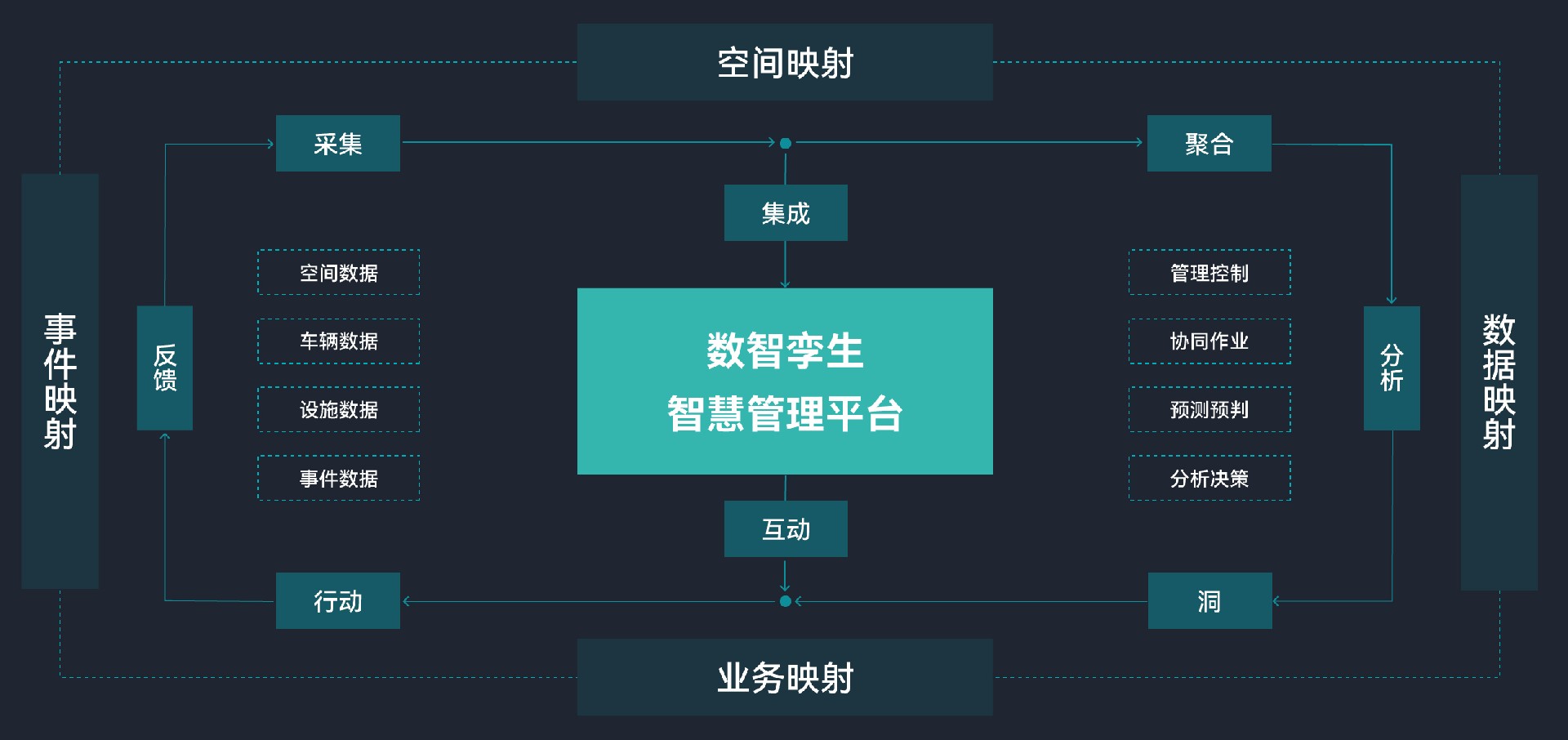
SYSTEM ARCHITECTURE
PRODUCT ADVANTAGES


對行車(chē)中(zhōng)的駕駛行為(wèi)進行設備告警、路況告警、險情告警和操作(zuò)告警,并聯動園區(qū)各業務(wù)體(tǐ)系,實現應急追溯及協同合作(zuò)。
車(chē)輛及園區(qū)關鍵指标、資源配置和自動駕駛決策信息等闆塊的信息将以實時動态的數字化圖表形式整合至平台。
平台利用(yòng)強大的實時渲染三維引擎,構建城市場景真實的三維模型,并與城市交通狀态實時同步,支撐數字孿生應用(yòng)。
CUSTOMER VALUE
它可(kě)以降低無人駕駛車(chē)輛研發和測試的成本,減少雇傭人員和采購(gòu)設備的時間和費用(yòng)。同時,還可(kě)以降低商(shāng)品金融成本,提供更高的公(gōng)司盈利水平。
仿真平台可(kě)以模拟各種天氣、道路情況和車(chē)輛行駛環境,客戶可(kě)以在安(ān)全可(kě)控的情況下進行最大化的實驗,更好地優化自身無人駕駛車(chē)輛的技(jì )術和應用(yòng)方案。
通過可(kě)視化和虛拟仿真技(jì )術,客戶可(kě)以更直觀地觀察和評估無人駕駛車(chē)輛的性能(néng)和工(gōng)作(zuò)流程,為(wèi)産(chǎn)品設計和研發提供決策支持。
客戶可(kě)以在模拟真實場景的情況下,更快地測試和調整無人駕駛車(chē)輛的性能(néng),加速産(chǎn)品開發和驗證過程。
APPLICATION CASES

二期項目聚焦
1. 遠(yuǎn)程駕駛與車(chē)路協同數據接入:實現與道路管理(lǐ)系統的無 縫對接,實時孿生展示車(chē)輛行駛與道路管理(lǐ)情況,确保行 車(chē)安(ān)全與效率。
2. RoboTaxi算法決策路徑還原:接入車(chē)輛實際運行數據和中(zhōng) 控系統信息,通過對比中(zhōng)控數據、環境數據、決策信息, 精(jīng)準還原自動駕駛算法在行駛過程中(zhōng)的實時決策路徑,為(wèi) 優化算法提供有(yǒu)力支持。
3. 全景記錄與回放功能(néng):記錄行駛過程中(zhōng)的每一個細節,并 提供回放功能(néng),助力事故調查與分(fēn)析。
4. 打車(chē)業務(wù)精(jīng)細化運營指标:針對打車(chē)業務(wù),構建了一套精(jīng) 細化的運營指标體(tǐ)系,為(wèi)業務(wù)優化和決策提供數據支撐。
三期項目規劃:
L4級别運營監控
全面V2X數據接入
無人駕駛實時輔助分(fēn)析
算法模拟仿真